Robo-Forming Digital Twin
An advanced and intelligent manufacturing pipeline for Roboforming — a flexible, low-cost, software-controlled alternative to both traditional and CNC forming, targeted currently at prototyping and low-volume, high-mix applications.
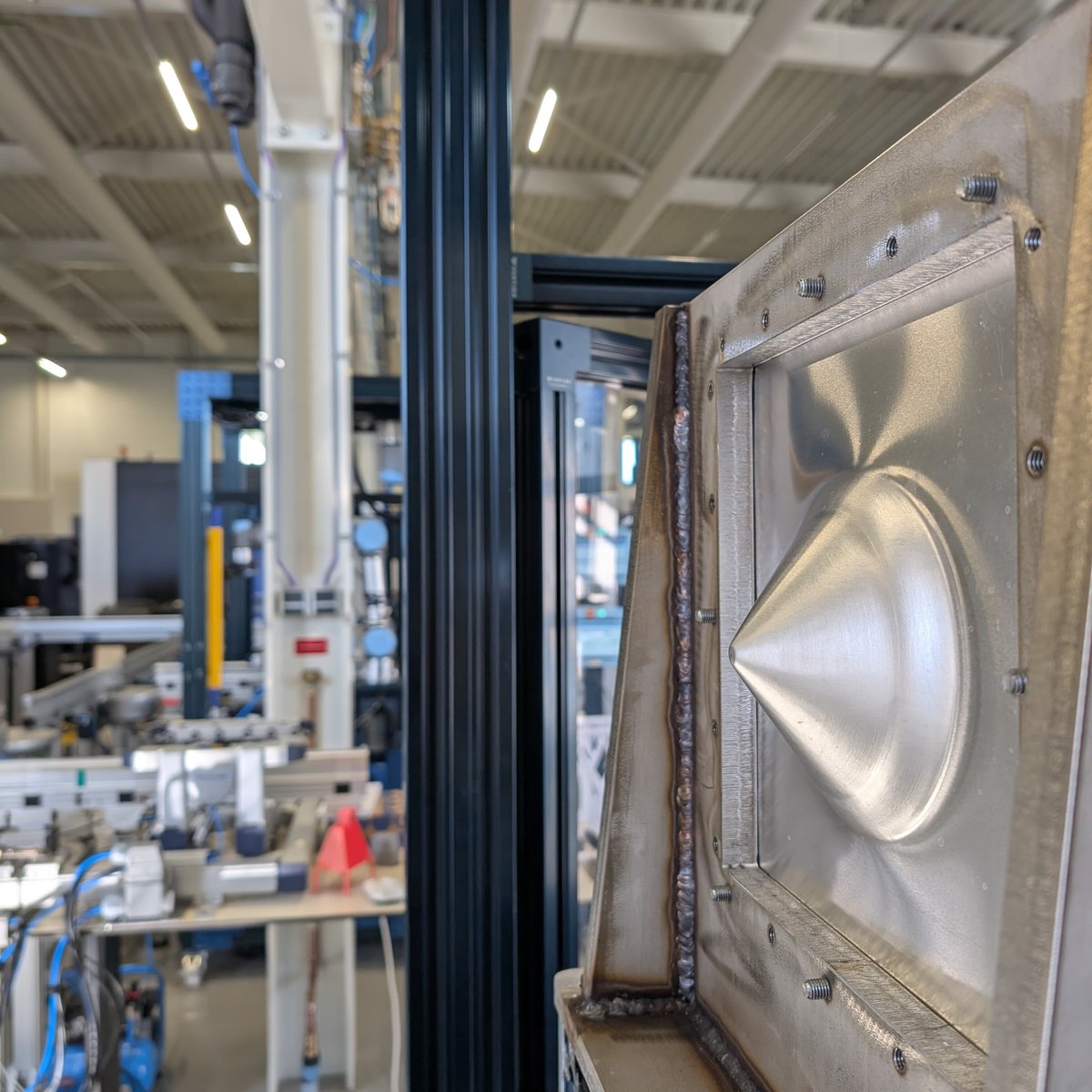
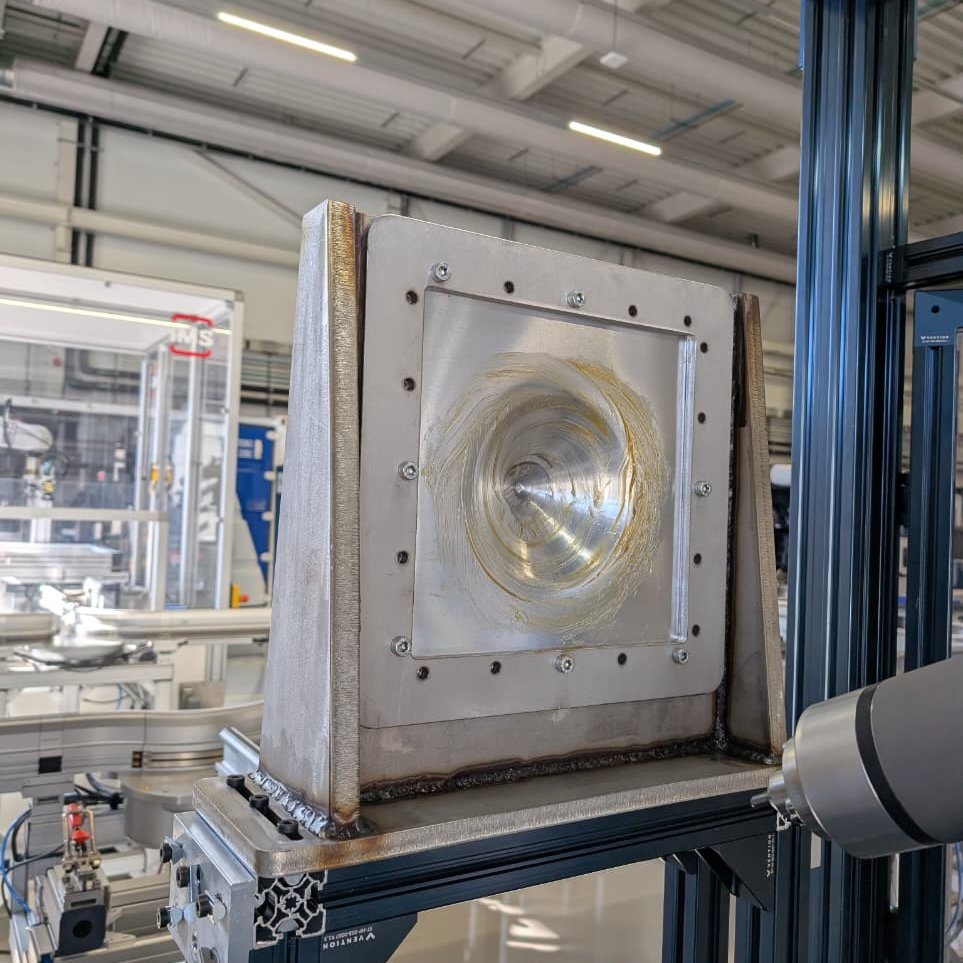
Heavily rigid and high-payload-capacity robots are used conventionally for robotic incremental forming. Contrary to that, this work aims to use low-payload collaborative robots on opposite sides of the sheet — enabling far better geometric accuracy and lesser forming forces, integrating AI-based force-controlled path planning. The result is a far cheaper, more accessible, and more deployable forming setup.
After designing and manufacturing the custom fixture, the path is planned with both the robot's own planner and with the target of a custom AI-informed forming path planner. The whole pipeline is now being finalized and tested with ROS 2 to make Roboforming parametric and flexible.
Outcome: CAD-to-Forming pipeline, ready to implement. Reduced the forming forces by 70% through a better trajectory planner. The pipeline is parametric and adaptable to any manipulator, and path planning is fully automated.